

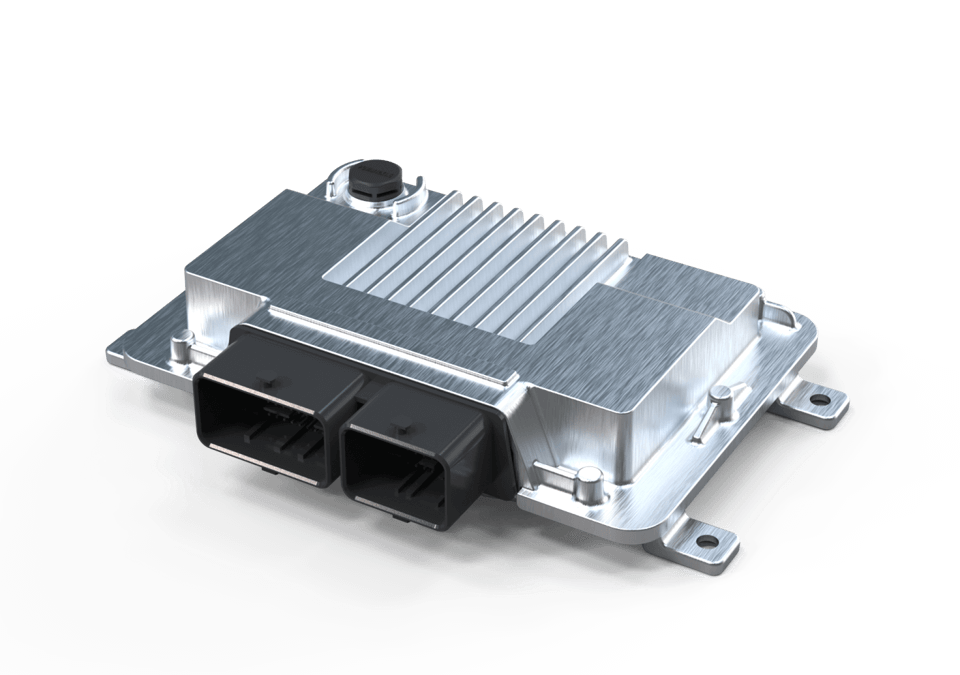
| Input voltage | 9~32VDC |
| Power | <5W (without output) |
| Input | 2-way wake-up (high), 12-way digital signal (high and low can be matched), 10-way analog signal ( 0~5V), 2-way analog signal ( 0~15V), 1-way analog signal ( 0~30V), 2-way PWM signal4) |
| Output | 4-way sensor power outputs (5V), 6-way digital low-side drivers, 4-way digital high-side drivers, 3-way digital high-level enable outputs, 4-way PWM outputs, 2-way analog signal outputs (0~5V) |
| Correspondence | 3-way CAN communication, 1-way serial communication. |
| Operating temperature | -40℃~ +60℃ |
| Cooling method | Natural cooling |
| Size | 138.9mm×201.2mm×41.5mm |
| Weight | 0.6kg |
| Protection class | IP67 |




86-25-56227788




